

【儀表網 研發(fā)快訊】近日,北京大學先進制造與機器人學院王啟寧教授課題組在穿戴式機器人及人機耦合效能增強方面取得新進展,研制出首款便攜式潛水輔助外骨骼機器人系統(tǒng),通過提供膝關節(jié)助力,顯著降低了潛水過程中的空氣消耗與肌肉激活水平。該研究成果以“An Underwater Exoskeleton for Scuba Diving: Reducing Air Consumption and Muscle Activation Through Knee Assistance”為題,于2025年10月14日在線發(fā)表于IEEE Transactions on Robotics。
海洋覆蓋了地球表面的71%,是人類活動的重要空間。水肺潛水作為探索水下世界的主要方式,在海洋科研、資源勘探等領域發(fā)揮著關鍵作用。然而,與高效的陸地行走不同,人類在水下運動時需要克服水體阻力,能量消耗遠高于陸地,嚴重限制了潛水員的續(xù)航能力和作業(yè)范圍。近年來,新興的下肢外骨骼技術已在陸地行走、跑步等場景中展現出降低人體代謝成本的巨大潛力。能否將外骨骼技術應用于水下環(huán)境以提升人類的潛水效率?本研究針對這一挑戰(zhàn)給出了肯定答案。
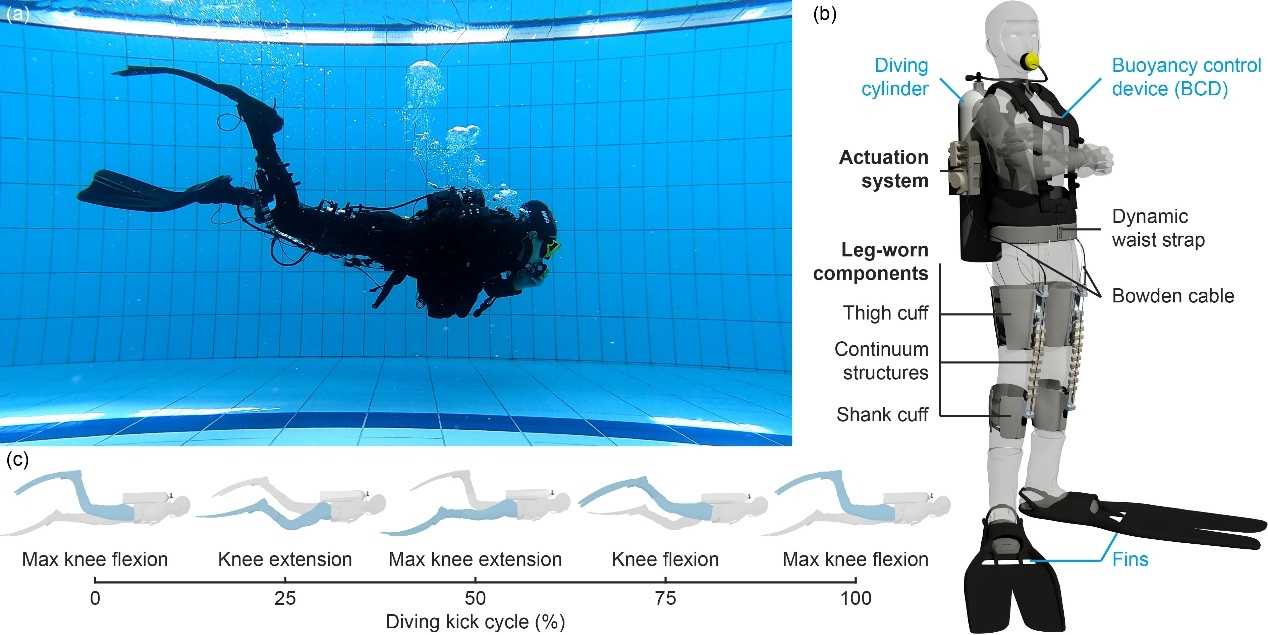
圖1 水下外骨骼整體設計
要實現潛水輔助,需要克服多方面困難。相比于陸地,水下運動的生物力學研究很少,其動作特征也與陸地存在根本差異,這為外骨骼的輔助原理與力矩曲線設計帶來了挑戰(zhàn);水下環(huán)境對外骨骼的防水、配重平衡、穿戴牢固性及控制有效性均提出了嚴峻挑戰(zhàn),而相關研究先例屈指可數、效果有限,難以提供有效參照;對水下可穿戴機器人性能進行量化評估本身也存在相當難度。
針對以上問題,王啟寧課題組提出并研制了一款雙側繩驅動膝關節(jié)水下外骨骼,其輔助力矩曲線啟發(fā)自潛水員的股四頭肌激活特征。利用大小腿處的慣性傳感器實時估計運動相位,基于力測量的迭代位置控制策略能夠精準施加力矩。在系統(tǒng)設計上,外骨骼采用繩驅動結構,使2/3以上的重量集中于潛水員背部,可通過浮力背心有效補償、避免水下失衡。腿部執(zhí)行端的連續(xù)體結構能適應膝關節(jié)瞬心的變化,在傳遞助力的同時避免與膝蓋碰撞。通過采用此前提出的動態(tài)腰帶,課題組解決了水下大腿綁帶容易下滑的問題,增強了穿戴穩(wěn)定性。此外,研究綜合運用了氣體消耗、水下運動學、水下肌電與外骨骼輸出力4類信號,以全面評估外骨骼的整體輔助效果。
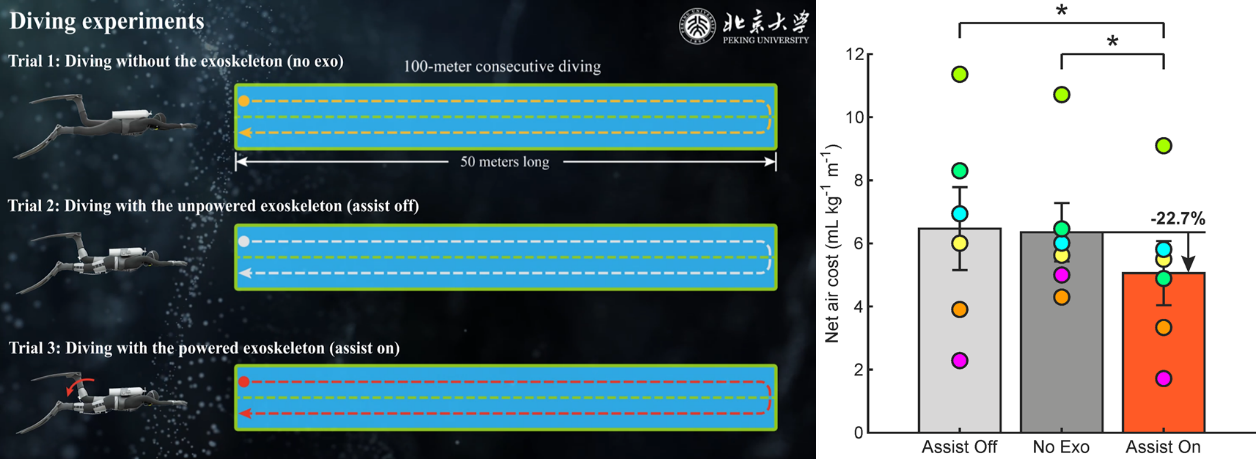
圖2 不同條件下移動單位距離的凈空氣消耗
為驗證外骨骼的有效性,研究團隊組織了6名經驗豐富的潛水員進行了實驗測試。潛水員需分別在無外骨骼、穿戴外骨骼但無助力、穿戴外骨骼且有助力3種條件下完成100米水下游動。實驗結果表明,與無外骨骼潛水相比,在外骨骼助力下,潛水員的凈空氣成本降低了22.7%,峰值股四頭肌激活水平降低了20.9%。此外,腓腸肌的平均激活也顯著降低了20.6%,這表明潛水員充分適應并利用了外骨骼輔助。相比于人類自然行走能力,潛水是一種后天學習的運動,這可能允許外骨骼更大程度地干預/矯正人體游動動作,而不產生能耗上的負面影響。

圖3 主要的動力學、運動學和肌肉激活結果
王啟寧課題組在國際上率先開展穿戴式水下游動助力機器人研究,近年來取得了一系列研究成果。本項研究為最新進展之一,成功地將外骨骼技術的應用邊界從陸地擴展至實際水下環(huán)境,證明了動力外骨骼在特殊環(huán)境下增強人類能力的可行性。該水下外骨骼提供了一種全新的生物啟發(fā)式推進方案,有望應用于延長水下作業(yè)時間、減輕潛水員疲勞以及輔助潛水訓練等多個場景,為未來水下助游設備的設計與評估提供了重要參考。
該論文的第一作者為北京大學先進制造與機器人學院博士研究生吳顯達、徐明,北京大學人工智能研究院助理研究員周志浩。王啟寧為唯一通訊作者。合作者包括北京大學工學院已畢業(yè)碩士生婁文杰,北京大學先進制造與機器人學院工程師張騰、周亞雷,副研究員麥金耿。



















所有評論僅代表網友意見,與本站立場無關。