

【儀表網 研發快訊】近日,上海交通大學集成電路學院(信息與電子工程學院)智能感知與生物醫學微系統實驗室楊斌研究員團隊,針對微型狹窄管道環境探測,提出了一種超聲微型機器人設計,相關成果以“An Ultrasonic Microrobot Enabling Ultrafast Bidirectional Navigation in Confined Tubular Environments”(可在密閉管狀環境中實現超快速雙向導航的超聲微型機器人)為題發表在《Nano-Micro Letters》上。
研究背景
管道作為石油化工、發電、核能及醫療保健等行業輸送氣體、液體的重要通道,隨著使用時間延長,常因老化、腐蝕、堵塞或損壞而需要定期檢查。然而,許多管道內部空間狹窄且幾何結構復雜彎曲,常規檢測方法難以進入,帶來巨大挑戰,催生了對新型檢查技術的迫切需求。近年來,微型機器人被視為管道檢測的潛在方案,并涌現出多種驅動方式,包括磁場、氣動、介電彈性體、電磁、電化學、光能及壓電驅動等。但各類方式受限于驅動條件和結構尺寸:氣動或電機驅動僅適用于大管徑,磁驅動受鐵磁管道限制,光驅動難以在不透明管道應用,介電彈性體驅動需要數千伏高壓。因而,研發一種能在狹窄密閉管道中低電壓驅動并高速導航的微型機器人,仍是亟待解決的關鍵問題。
創新成果
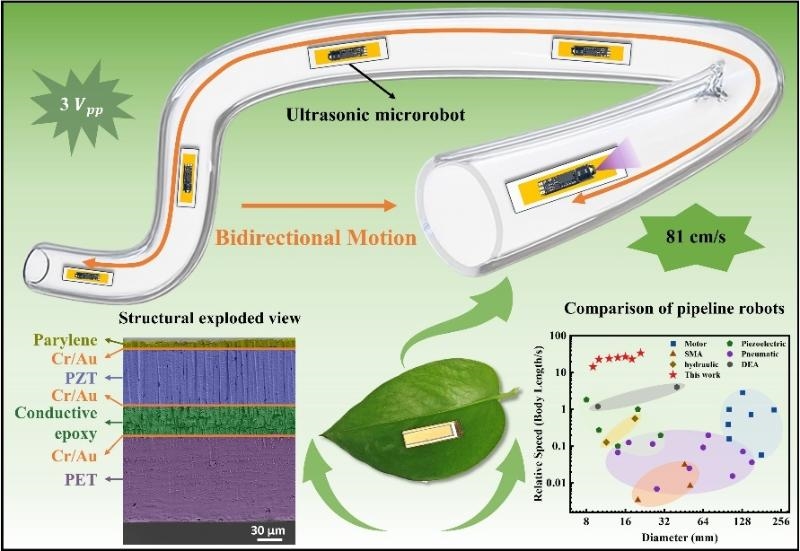
該研究提出了一種基于MEMS工藝的超聲驅動微型機器人,其核心優勢在于低電壓驅動(3 Vpp)、高速雙向運動(81 cm/s)、強爬坡(24.25°)與承載能力(超過自重36倍)。機器人可在毫米級狹窄管道、彎曲管道、不同材質管道及水面環境中靈活運行,并可搭載微型內窺鏡實現實時檢測,在微型管道檢測中展現出巨大應用潛力。

超聲微型機器人的設計
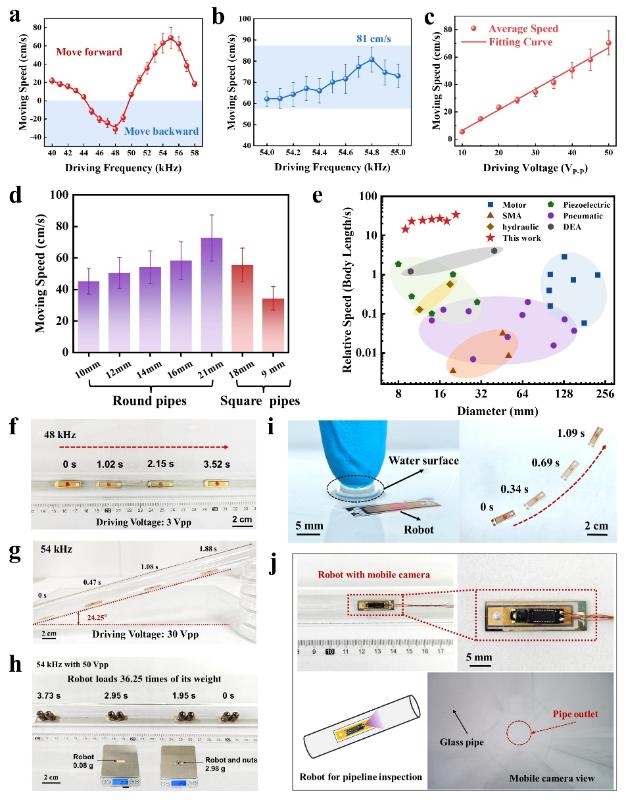
該微型機器人依托高性能PZT壓電薄膜在交變電場下的快速伸縮變形實現驅動,超聲頻率可激發高階彎曲模態,使主體產生波浪狀運動,并在與管壁摩擦耦合下將微觀振動轉化為宏觀高速運動。實驗結果表明,在約54.8 kHz諧振頻率下,機器人運動性能最佳,速度可達81 cm/s。通過調節驅動頻率,機器人能夠在不同模態下實現前進和后退的切換。機器人的驅動電壓與速度呈近似線性關系,進一步證明了壓電驅動在能量輸入與運動性能之間的高效轉換能力。
進一步實驗表明,該超聲微型機器人在不同直徑管道中均具備良好適應性,且速度性能遠超其他驅動原理管道機器人。其最小驅動電壓僅3 Vpp,遠低于介電彈性體和多數壓電機器人,展現出高效的能量利用率。同時在爬坡、負載性能中展現卓越穩健性和性能優勢。該機器人還可在水面上開展運動,并可搭載微型內窺鏡攝像頭開展管道內實時成像檢測,驗證了機器人執行微型管道巡檢任務的可行性。
超聲微型機器人的性能表征、對比及應用測試
總結與展望
該研究報道了一種基于超薄壓電復合結構的超聲微型機器人,具備低電壓驅動(3 Vpp)、高速運動(81 cm/s)、雙向可編程導航及優異的爬坡和承載能力。其可適應直徑9–27 mm的多種管道,并在彎曲管道及水面環境中穩定運行。與其他驅動方式相比,該機器人在速度、能效和環境適應性方面更具優勢。通過集成微型內窺鏡相機,驗證了其在管道檢測中的潛力,未來結合電源與通信模塊有望實現無線自主應用。


















所有評論僅代表網友意見,與本站立場無關。